
Wil Koch, Sr. Staff Software Engineer
01
The Greek philosopher Heraclitus is often attributed to the phrase “change is the only constant.” This certainly holds true in aviation. During flight there are a number of events that require real-time decisions from the pilot. To support safe and effective autonomous flight in a continuously changing environment, our Autonomous Navigation (AutoNav) feature for the Merlin Pilot is constantly monitoring for changes that can affect the current mission and will replan the route accordingly.
Weather, temporary flight restrictions, mechanical failure and runway closures are just a few events that can affect a flight in real-time. Did you know there is even a special Notice to Air Missions (NOTAM) called a BIRDTAM to warn about bird strikes? To react to such events, our AutoNav skill for the Merlin Pilot continuously evaluates the environment through various sensors and data sources to determine if a change to the environment conflicts with the current route.
If a conflict is detected, the monitoring system issues a flight plan request to the Merlin Mission Planner, a subsystem to AutoNav, to dynamically re-plan the route. The Mission Planner’s role is to assemble an optimal and feasible route such that the underlying flight control system can fly the route. The flight plan request to the Mission Planner can be as simple as ‘Land at Mojave airport.’ However, the Mission Planner is not limited to airborne dynamic replanning. It is also used to generate a full flight mission from takeoff to landing, for example with the request ‘Takeoff from Mojave and Land at Cal City.’
To construct actual routes the Mission Planner coordinates with the auto-router, another subsystem in AutoNav. Given a start and end location the auto-router analyzes the environment and constructs an optimal route avoiding any hazards along the way.
The auto-router uses hard and soft constraints to build a route. Hard constraints include obstacles such as mountains that aircraft must avoid absolutely. Soft constraints represent tradeoffs, for example between risk and flight time, that a human pilot might make when deciding whether to fly through a cloudy region that has a chance of producing a thunderstorm. To generate the route, the auto-router analyzes all of the constraints in the vicinity of the flight plan request and finds the optimal route.
Once constructed, the proposed route is displayed on a pilot interface for review. In our initial testing, the pilot is “in the loop” and must authorize the proposal for the system to fly it. In some applications such as emergency re-routing, the pilot will instead be “on the loop” and the system will fly its proposal by default unless the pilot rejects it within a certain amount of time.
An example of a proposed route in a pilot interface app can be seen in Figure 1. In this scenario the blue region represents a hazard that was introduced in real-time that intersected the current route (green). The AutoNav feature detected the intersection of the hazard with the current route and proposed a new route (yellow) that routes around the hazard. The pilot has the option to either authorize the proposed route or cancel the proposal and continue on its current course.
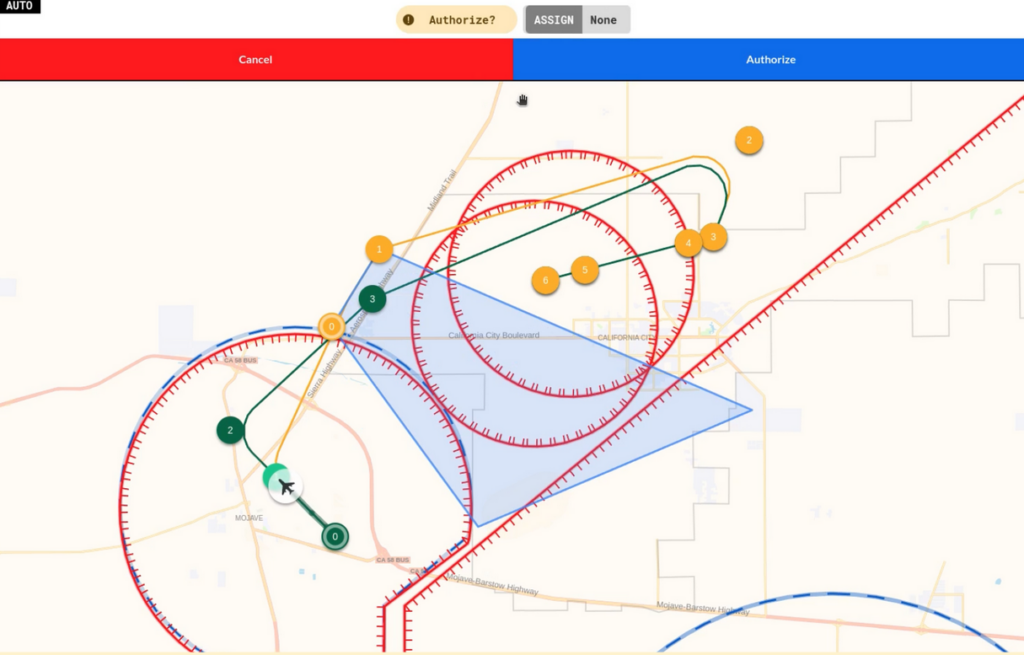
Figure 1: View of the pilot interface proposing a new route.
As Merlin’s Vice President of Flight Operations Mark Ward put it, “As a pilot, I believe that options like auto-routing and dynamic replanning are essential capabilities that will give aircrews extra bandwidth during high workload scenarios. They ensure accuracy and ultimately improve overall flight safety. I’ve witnessed the system perform mission replans in a manner consistent with the way any pilot would do it. This is truly a valuable capability that I am confident pilots the world over will embrace.”
The capabilities of the AutoNav skill to autonomously generate a constraint-aware route between two points, using minimal information, establishes a foundation to build new advanced navigation and safety features. To enhance advanced navigation Merlin is incorporating named waypoints and airways to provide pilots with increased flexibility when making flight plan requests. The minimalist syntax of the flight plan request also opens up new speech recognition opportunities allowing the pilot to communicate with AutoNav as a virtual co-pilot. AutoNav will also be integrated into various emergency procedures such as emergency descents and precautionary landings to improve safety for the pilot and passengers.